
Realizzato da un team di ricerca dell’Università di Tokyo utilizzando cellule muscolari umane coltivate in laboratorio, questo innovativo progetto rappresenta un passo significativo verso l’integrazione tra componenti biologici e non biologici, nonostante le sfide legate alla vitalità dei tessuti muscolari e alla loro integrazione con strutture artificiali.
Shoji Takeuchi, professore all’Università di Tokyo, guida un team che ha costruito una mano bioibrida a grandezza naturale, lunga 18 centimetri, con tutte e cinque le dita mosse da muscoli umani coltivati in laboratorio. La tecnologia dei robot bioibridi combina componenti biologici, come muscoli e materiali vegetali, con elementi non biologici. Sebbene siamo diventati abili nel creare le parti non biologiche, mantenere in vita i componenti organici è sempre stato complicato. Questo ha limitato le dimensioni e la complessità delle macchine guidate da muscoli biologici.
Mantenere in vita i componenti organici: superare la necrosi
Uno dei maggiori ostacoli nella costruzione di robot bioibridi di grandi dimensioni è la necrosi, ovvero la morte dei tessuti muscolari. Nei laboratori, i muscoli sono solitamente coltivati su piastre di Petri (capsule cilindriche, generalmente realizzate in vetro o plastica trasparente, dotate di un coperchio che permette lo scambio di aria e impedisce la contaminazione), dove possono ricevere facilmente nutrienti e ossigeno. Tuttavia, quando i muscoli diventano più spessi, le cellule interne rischiano di morire per mancanza di nutrienti. Takeuchi e il suo team hanno affrontato questo problema coltivando fibre muscolari sottili e piatte, successivamente arrotolate in tubi chiamati MuMuTA, simili a rotoli di sushi, per ottimizzare la contrazione muscolare mantenendo una buona diffusione dell’ossigeno.
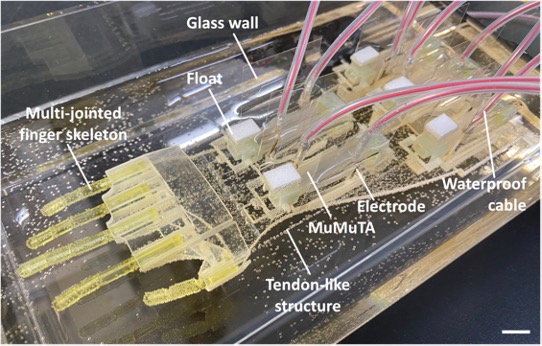
Fonte: X. Ren, Y. Morimoto and S. Takeuchi, 2025/ Science Robotics
Il movimento dei MuMuTA
I MuMuTA permettono il movimento attraverso segnali elettrici trasmessi da elettrodi. Questi rotoli muscolari possono piegarsi o ruotare, e la loro forza contrattile è regolata dalla tensione applicata. Utilizzando cinque MuMuTA, il team ha costruito una mano robotica con dita articolate. Nonostante le limitazioni, come il movimento unidirezionale delle dita e la necessità di un ambiente liquido per funzionare, la mano poteva eseguire gesti complessi come quelli del gioco “sasso, carta, forbici”.
La palestra dei robot bioibridi
La mano bioibrida ha mostrato segni di fatica dopo circa 10 minuti di uso continuo, evidenziando una delle principali sfide nell’uso di muscoli biologici nei robot. I muscoli coltivati in laboratorio, sebbene deboli rispetto ai muscoli viventi, potrebbero migliorare con l'”esercizio”. Takeuchi suggerisce che, come i muscoli naturali, anche quelli ingegnerizzati potrebbero beneficiare di contrazioni ripetute per migliorare forza e resistenza, oppure dell’uso di fattori di crescita chimici per potenziarne le capacità.“Il campo della robotica bioibrida è ancora agli inizi, con molte sfide fondamentali da superare. Una volta superati questi ostacoli di base – spiega Shoji Takeuchi dell’Università di Tokyo – questa tecnologia potrebbe essere utilizzata in protesi avanzate e potrebbe anche servire come strumento per comprendere il funzionamento dei tessuti muscolari nei sistemi biologici, per testare procedure chirurgiche o farmaci mirati ai tessuti muscolari”.









